CBSF-75协作机器人瞬态和准静态力和压力测量系统
Force and Pressure Measurement System for Collaborative Robots
协作机器人瞬态和准静态力和压力测量系统是用于简化测量方法的手持式测量设备,用于检查协作机器人上的瞬态和准静态力和压力。
在任何不分离防护设备的人机协作(HRC)中,都无法完全排除人机之间的碰撞。必须遵守符合ISO / TS 15066的力和压力的允许极限值,因为它们可以确保HRC工作场所的安全运行。
测量范围 弹簧常数 高度(mm)
CBSF-10 20 ... 300 N 10N /mm 107
CBSF-25 20 ... 500 N 25 N /mm 89
CBSF-30 20 ... 400 N 30 N /mm 75.5
CBSF-35 20 ... 500 N 35 N / mm 76
CBSF-40 20 ... 500 N 40 N / mm 73.5
CBSF-50 20 ... 500 N 50N / mm 65
CBSF-60 20 ... 500 N 60 N /mm 64
CBSF-75 20 ... 500 N 75 N / mm 62
CBSF-150 20 ... 500 N 150N / mm 60
技术参数:
测量面:80 mmØ
最大测量误差:读数的±3%
测量误差:典型值。读数的±1%
上升/下降时间:≤1 ms
内部存储器容量:100次
单次测量
电源:集成镍氢充电电池
消耗功率:20 mA
接口:USB /无线
温度范围:-10…+50°C
相对湿度:20…90%r。 H。 (非凝结)
防护等级:IP 20
重量:〜790克
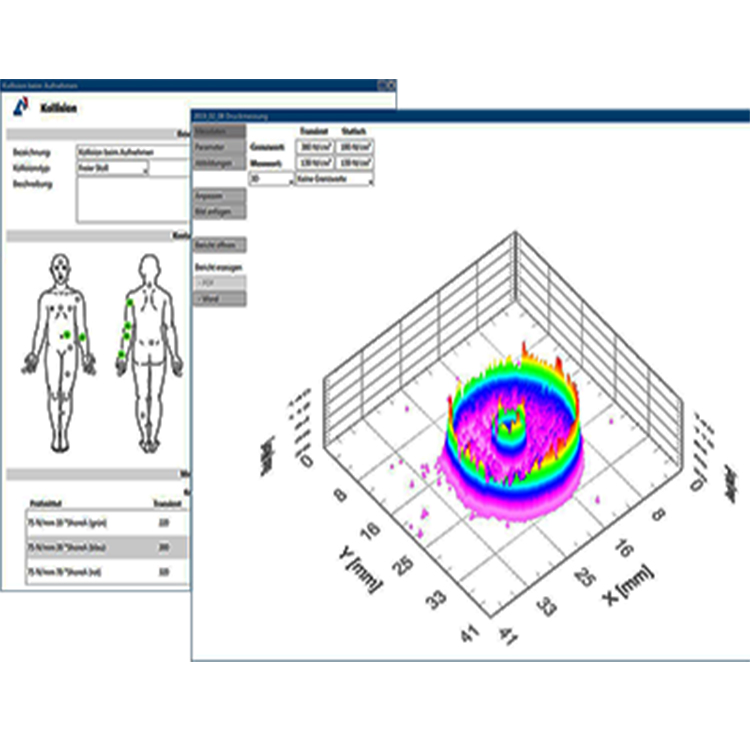
通过扫描进行压力测量(设置CoboSafe-Scan)
测量误差:典型值。 ±10%或更低(在23°C,65%r.h.下测量)
温度范围:+20…+35°C
相对湿度:35…〜80%r。 H。
薄膜测距LLW:50-250 N /cm²
薄膜测距范围LW:250-1000 N /cm²
使用薄膜传感器进行压力测量(Set CoboSafe-Tek)
可选提供:
-CBSF-75-夹爪作为附加力传感器,用于夹爪的测量
-CBSF-75-Basic:带有手柄和显示屏的力传感器
-安装支架
压力传感器类型:9500 5051 5151 5101 5027
压力范围:827 N /cm²242 N /cm²242 N /cm²242 N /cm²345 N /cm²
测量表面:70 x 70毫米56 x 56毫米165 x 165毫米112 x 12毫米28 x 28毫米
传感器:3.9 /cm²62.0 /cm²7.1 /cm²15.5 /cm²248.0 /cm²
测量误差:<10%<10%<10%<10%<10%
|













